
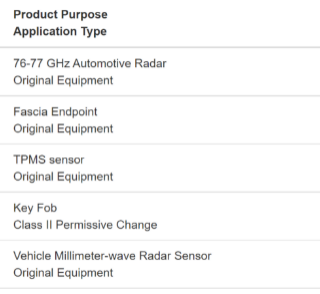
2022 年 6 月 7 日,特斯拉向 FCC 联邦通讯委员会提交了毫米波雷达的相关材料。
一般而言,在美国上市的射频相关产品,都必须向 FCC 提交第三方测试材料来证明其符合美国的频谱管制规则。
这意味着特斯拉不仅没有放弃毫米波雷达,而且亲自下场设计了一款毫米波雷达。
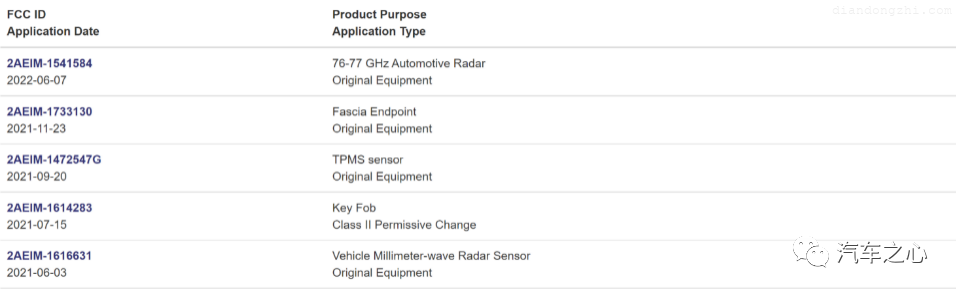
实际上在 1 年前,也就是 2021 年 6 月 3 日,特斯拉就提交了一份有关毫米波雷达的材料,即 2AEIM-161631,这是一款比较特殊的 60GHz-64GHz 的毫米波雷达。
目前这款毫米波雷达的用途未知,从材料上看,其主芯片是德州仪器的 IWR6843AOP,可能是驾驶者生命体征监测 Driver Vital Monitoring,即监测驾驶员的心跳脉搏。
虽然马斯克说要取消汽车前向毫米波雷达,但从特斯拉车主手册的内容来看,毫米波雷达一直都在,从未取消。
在美国地区,2022 年款特斯拉 Model Y 车主手册第 219 页明确指出:
「Traffic-Aware Cruise Control and Autosteer are unavailable because the radar located in the front bumper area of your vehicle has no or low visibility. Continue to your destination. Your vehicle is OK to drive. Traffic-Aware Cruise Control and Autosteer will remain unavailable as long as the radar lacks adequate visibility. This could be a temporary obstruction caused by factors like snow, ice, dirt, or mud. If the alert is caused by a temporary factor like these, no action might be needed: the condition might clear during your drive.」
可以看出,特斯拉智能驾驶必须要毫米波雷达配合。
2021 年推出的 Model S Plaid 也是如此:
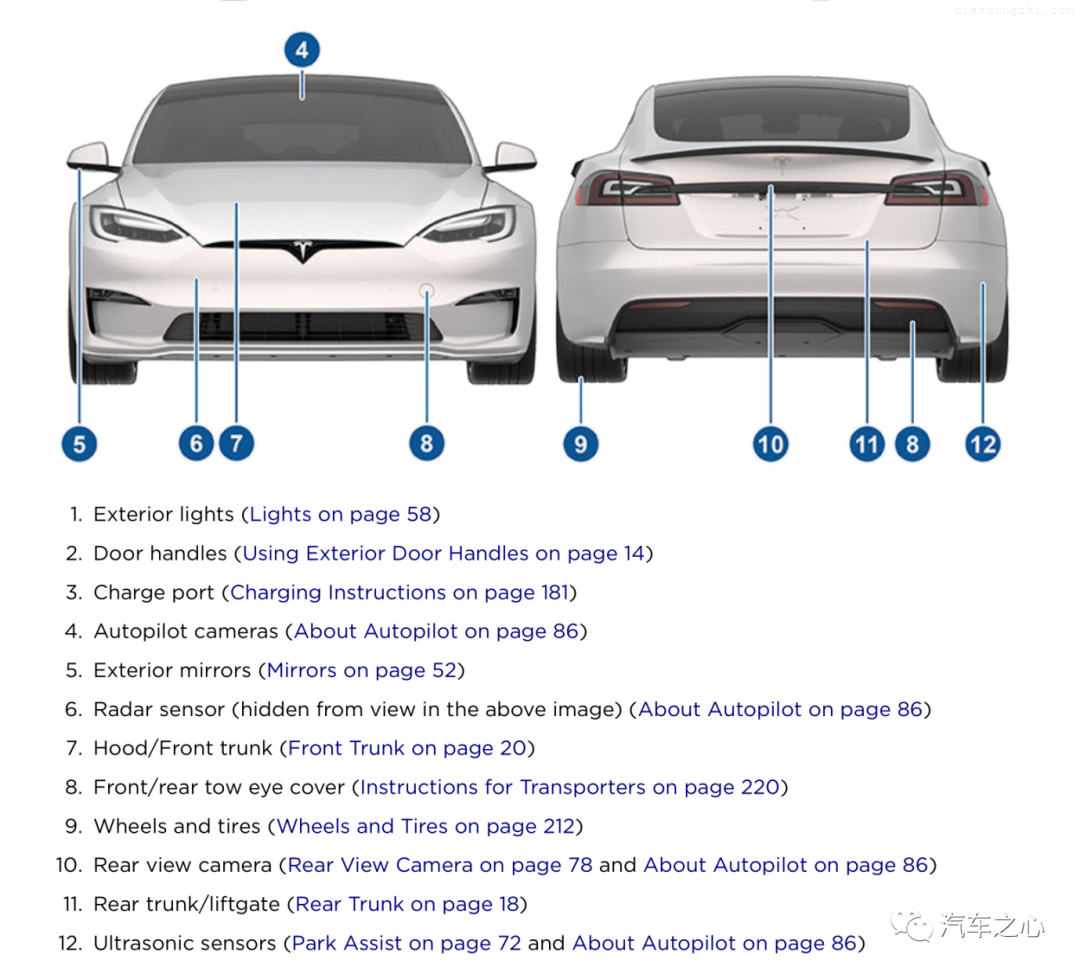
图中的【6】就代表毫米波雷达,和 Model 3 一样,Model S Plaid 搭载的还是大陆汽车旗下 ASC 公司的 ARS-4B,最远有效距离为 170 米。这是 2014 年初的产品,性价比很高,特斯拉一直在使用。
同期,ASC 还推出了 ARS-4A,有效距离可达 250 米,不过价格要高一点。因此大部分车企都选择了 ARS-4A。
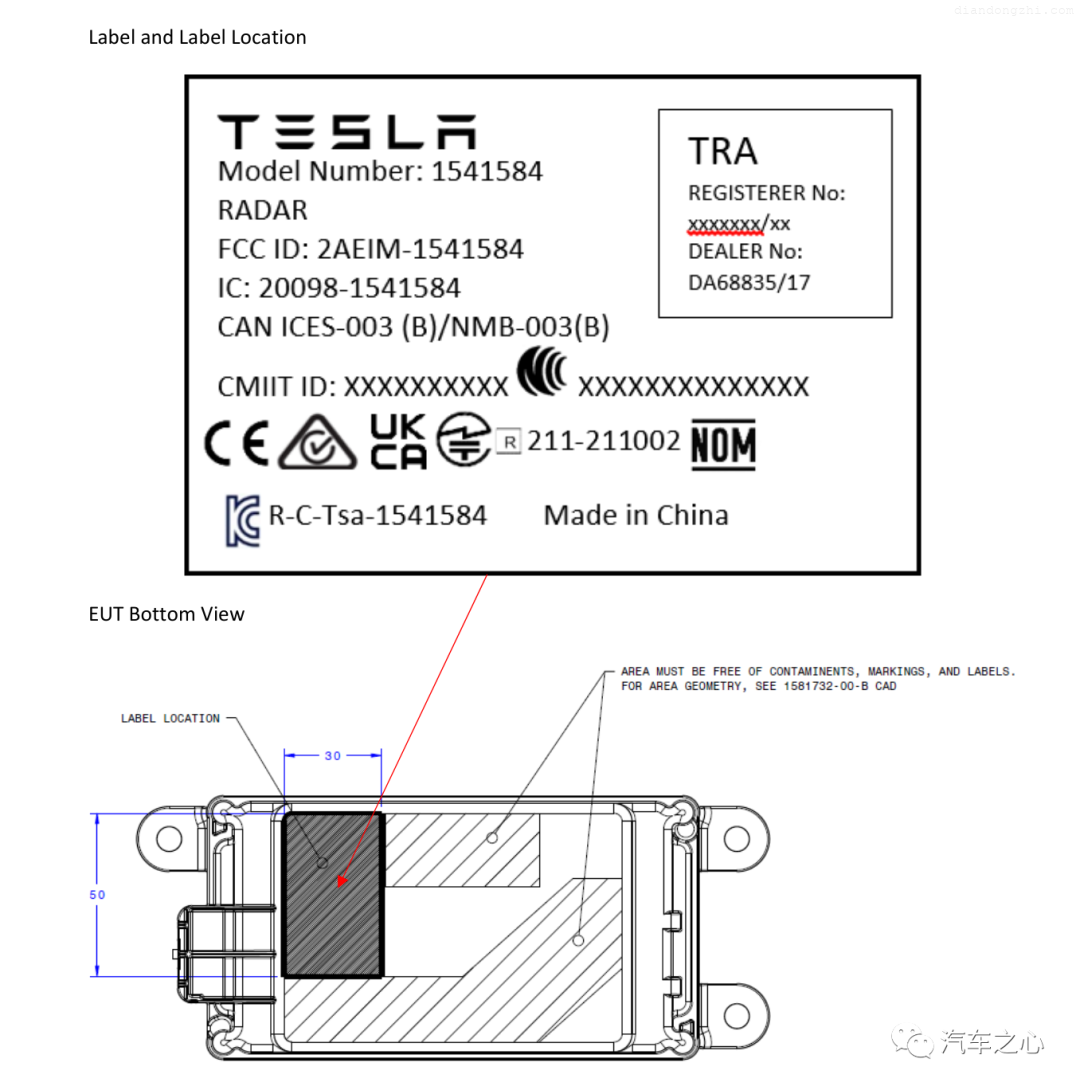
按照 FCC 惯例,部分资料保密,要到半年后才解除保密限制。
目前 FCC 网站只公开了特斯拉毫米波雷达的检测报告和 Label 标签。

眼下信息有限,只知道其大概参数,3 线进入,功率不低。特斯拉原先的大陆 ARS-4B 的功率输出仅 52 毫瓦。
特斯拉出现一系列投诉幽灵刹车的问题,其根源不是视觉系统,实际可能是毫米波雷达的问题。
毫米波雷达对金属目标敏感,特别是人行天桥和路边的标牌,甚至是中央护栏,特斯拉多次幽灵刹车,前特斯拉 AI 项目负责人——安德烈·卡帕西,曾在演讲中描述过一个特斯拉因「摄像头+毫米波雷达」技术路线造成「幽灵刹车」的典型案例:
当车辆即将驶入桥下的时候,毫米波雷达已经检测到了「桥」这个静态物体的存在,但是因为没有足够的分辨率,毫米波雷达分不清楚这个物体是桥梁还是汽车。
这时候就需要视觉感知来告诉系统:这个静态的物体到底是什么。
但由于关联了毫米波雷达的原因,摄像头在对前方物体各项参数的测量中都没有发挥足够的精度。
如果前方恰好有一辆缓慢减速的汽车(但不足以造成刹车),系统就会将视觉系统报告的「减速车辆」和雷达报告的「静态物体」相关联,从而导致不必要的刹车事件。
大部分毫米波雷达都过滤了静态目标,避免出现幽灵刹车。但特斯拉用的 ARS-4B 本来是设计工业领域用的,没有过滤静态目标。
再有一个,特斯拉为了美观,把毫米波雷达隐藏在保险杠内,如果是高品质的毫米波雷达,这个影响还不算太大,但 ARS-4B 是大陆汽车最低端的毫米波雷达,性能本来就差,隐藏后更差。
解决办法很简单:不是去掉毫米波雷达,而是更换为 4D 毫米波雷达。
因为视觉系统容易漏检,过滤了静态目标的毫米波雷达,也容易漏检。
L3 与 L2 自动驾驶的本质区别就是,前者尽量避免漏检,后者允许漏检。
毫米波雷达在测距测速方面,准确度远高于视觉系统,可靠性更高,是无法取代的存在。
特斯拉一向胆子大,即便如此,也不敢取消毫米波雷达。
大陆汽车的 ARS540 和博世第五代毫米波雷达,是目前唯二的 4D 毫米波雷达,性能完美。
但缺点也有,一个是价格太高。
要知道,大陆的 ARS4A 和 ARS4B 价格差不超过 50 美元。
其次是,这两个 4D 毫米波雷达有个缺点,就是背部隆起,造成高度太高。
如果车辆造型还未定型,还可以为毫米波雷达找到安装位置,这也就是说 4D 毫米波雷达只能为新车服务。
目前性能最好的 4D 毫米波雷达:大陆汽车的 ARS540,背部有大凸起
于是,特斯拉只能亲自下场,自己做毫米波雷达。
4D 成像毫米波雷达的技术门槛实际很低,这主要是德州仪器的功劳。
德州仪器在 2016 年底推出基于 CMOS 工艺的高集成度 77GHz 毫米波雷达芯片——适用于中短距场景的 AWR1642 系列,将前端 MMIC RF、DSP 和 MCU 三个模块集成在一个 77GHz 毫米波雷达 SoC 芯片上,显著降低了毫米波雷达成本,大幅拉低了车载毫米波雷达的硬件开发难度。
针对近距离场景,TI 打造了集成度更高的天线片上集成 (AoP)芯片,将天线集成在芯片里,将难度最高的平面印刷天线集成其中,毫米波雷达价格被拉低到百元级别。
相比其他雷达芯片厂商,TI 芯片开发具有傻瓜式的特点,底层软件开发很完备,工具链也很容易上手,任何一个入行两年的射频工程师基本都可以单独搞定一个毫米波雷达设计。
这也就催生了数量众多的初创毫米波雷达企业。
然而时间长了,TI 发现,NXP 和英飞凌几乎垄断的毫米波雷达芯片组市场格局并未有改变,于是 TI 另辟蹊径,力推 4D 成像毫米波雷达概念:
- 基本上在 2018 年底就提供基于 AWR2243 的 4 片级联 4D 毫米波雷达全套设计方案,包括最难搞定的天线也考虑在内,内嵌 4-element series-fed patch 天线。
- 算法部分则提供 MATLAB MIMO 和 beamforming 两种选择,就像交钥匙工程,让 4D 成像毫米波雷达没有技术门槛。
与此同时,作为毫米波雷达霸主的大陆,也在研发 4D 成像毫米波雷达,实际在 2015 年大陆就预感到传统 3D(即速度、距离和方位角,这是传统毫米波雷达提供的数据)毫米波雷达已经走到尽头。
ARS540 的研发工作起始于 2016 年,最初的设计是使用 NXP 的 S32R274 ,但这带来一些问题,两片 S32R274 导致 PCB 面积太大,而汽车雷达是希望尽量小体积,同时前端的传感器融合需要比较高的带宽,大陆最初的设计是使用 MIPI CSI3,其带宽为 14.88Gbps,比我们常用的 MIPI CSI2 更好,而 S32R274 是MIPI CSI2。
但是支持 MIPI CSI3 的芯片很少。此外大陆希望 ADC 的精度更高,这样高度分辨率才足以实用,并且两片芯片的时钟同步等工作也比较麻烦,最终大陆决定使用 Xilinx 的 Zynq UltraScale+ RFSoC 系列 FPGA。
Xilinx 的 Zynq UltraScale+ RFSoC 系列 FPGA 专用射频领域设计,内部包含超高精度 ADC 和 DAC,有 12、14 比特两个档次选择,最多 16 个 ADC 或 DAC。
通常 ASIC 考虑成本,ADC 和 DAC 的配置都不会如此豪华,S32R274 里只有 4 个 12 比特 ADC,取样率只有 10Msps。
在被 FPGA 取代后,NXP 也开始抓紧研发针对 4D 成像毫米波雷达芯片组的工作。
2020 年 12 月,NXP 推出 S32R45 4D 成像毫米波雷达信号处理器和 TEF82xx 收发器,为 4D 成像毫米波雷达芯片组增加了一个选择项,未来英飞凌和模拟器件也很有可能推出相关的芯片组。
ARS540 采用 4 片级联的形式,将 4 片 NXP 的 77GHz 毫米波雷达收发器(即 MMIC)MR3003 级联,每个 MR3003 是 3 发 4 收,4 片就是 12 发 16 收。
目前绝大多数毫米波雷达都是采用单片收发器,通常只有 3 发 4 收,也就是只有 12 个虚拟通道,而 ARS540 是 192 个虚拟通道,分辨率大大提高。可以称之为图像雷达。
TI 的方案也是如此,只是用 AWR2243 代替 MR3003,用 TDA2x 代替 FPGA。
除德国大陆汽车,中国乃至全球的 4D 成像毫米波雷达基本都是基于 TI 的级联方案,有追求低成本的 2 片级联,有追求性能的 4 片级联。
来自以色列初创公司 Vayyar 自己开发关键的收发器芯片,华为的 12 发 24 收 4D 成像毫米波雷达,据知情人士表示,是采用自研的芯片,应该是 4 片 3 发 6 收的收发器级联而成,但也有可能是德州仪器的 AWR1642 六片级联而成,AWR1642 是 2 发 4 收。
我们来看德州仪器的方案,德州仪器提供全套电路图:
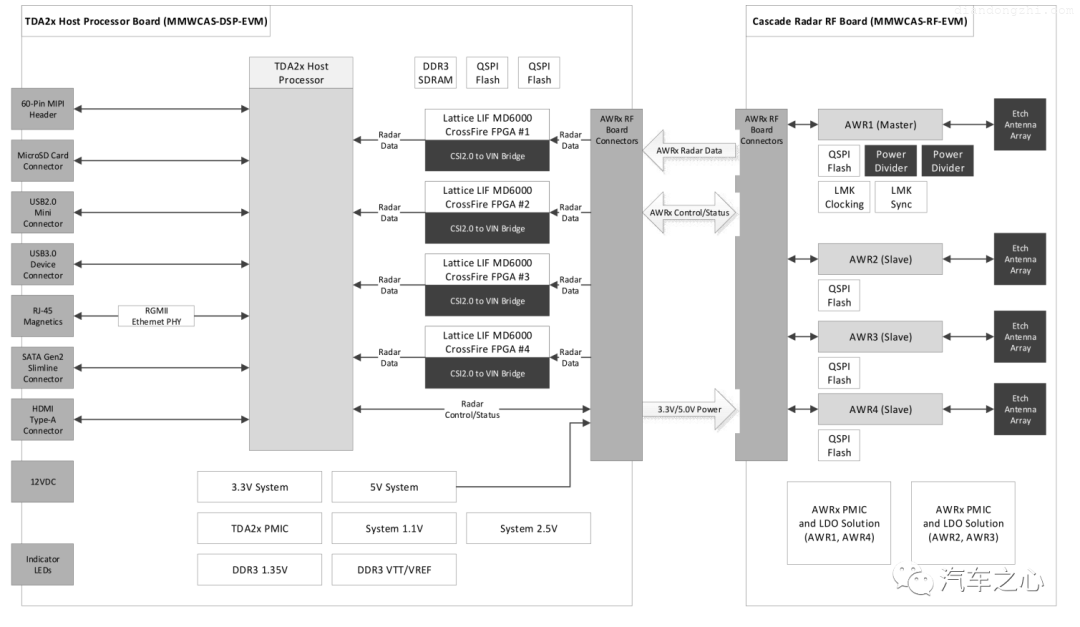
德州仪器 4D 成像毫米波雷达开发板框架图
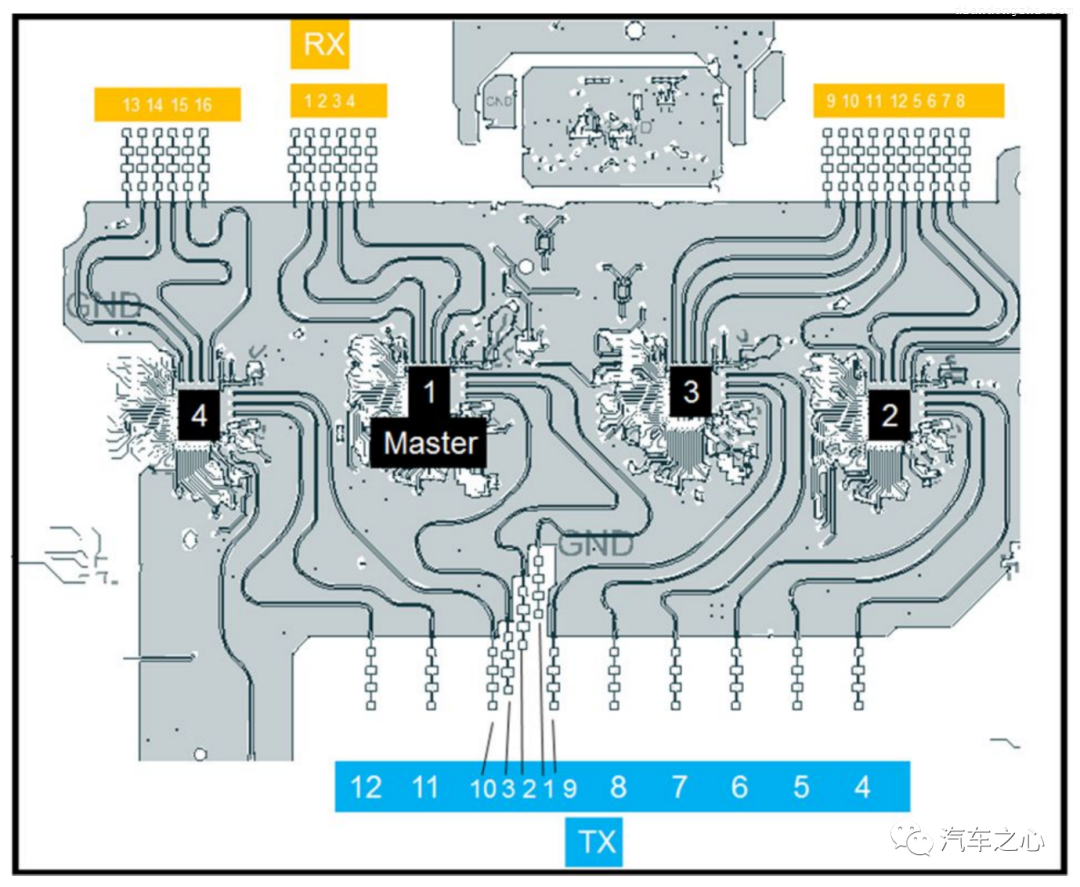
德州仪器 4D 成像毫米波雷达内嵌 4-element series-fed patch 天线,采用业内品质最高的 Rogers RO3003 PTFE 载板。
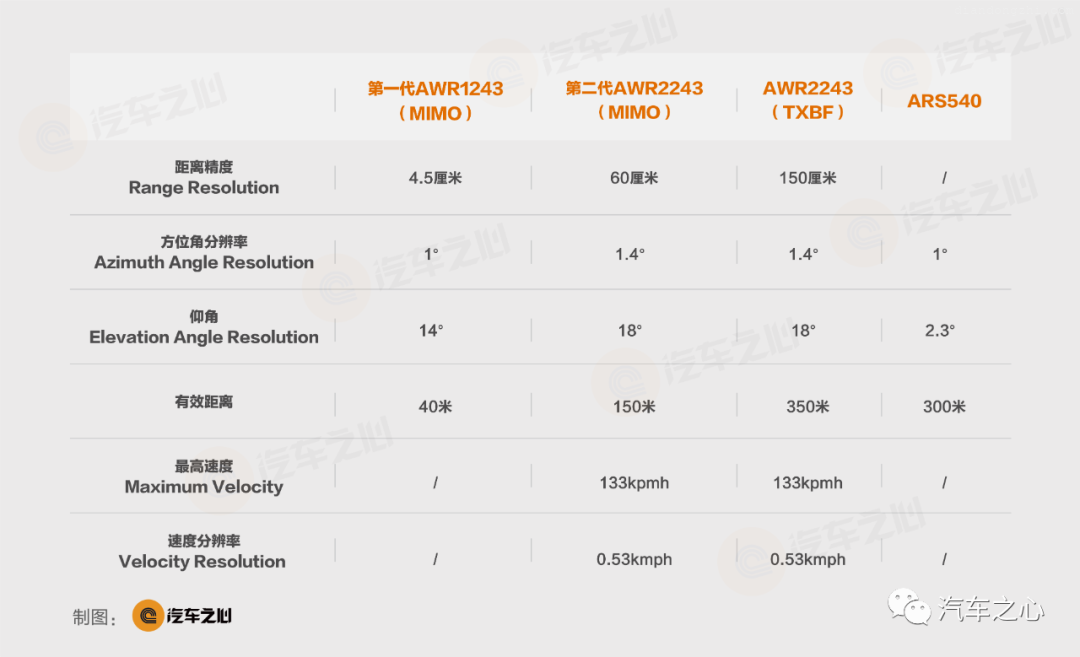
可以看出,德州仪器在距离和分辨率之间做了妥协。
ARS540 是唯一具备能够真正测量目标高度的毫米波雷达,也就是其垂直分辨率 Elevation 比较高,达到 2.3°,远高于德州仪器方案,毕竟大陆是自己设计天线,拥有超过 20 年的经验,且 MR3003 也确实比较强。
从这个角度讲,ARS540 到目前应该还是全球唯二 4D 毫米波雷达。
当然,如果不用德州仪器的内嵌天线,自己单独设计,可能会好一点,但会付出很长的研发周期,购置上千万人民币的研发设备和设施,初创公司肯定不会这么大手笔投资固定资产。

ARS540 的高度测量
成像毫米波雷达的成像是什么样的?
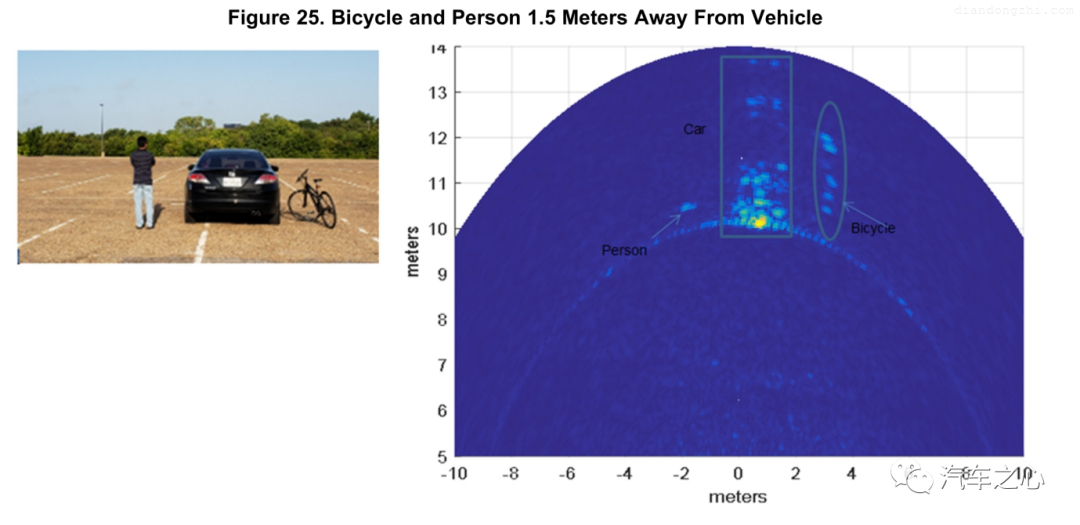
上图是取自德州仪器的开发板说明书,这是自行车和行人离车辆 1.5 米距离时的毫米波雷达成像图,如果是普通的 3 发 4 收单片 3D 毫米波雷达,自行车恐怕只能检测到一个点,甚至检测不到。
即便是成像毫米波雷达,行人也只是一个小点,普通雷达则完全检测不到,这是因为金属反射电磁波的性能远比人体要高。
显然成像毫米波雷达无法和激光雷达成像相提并论。
至于博世的五代毫米波雷达,目前还未有详细资料,但是肯定是 4D 雷达,性能可能不次于大陆汽车的 ARS540,其带宽为 76.065-76.932 GHz,近 900MHz,ARS540 还是 500MHz。
博世的缺点可能是功耗太高,射频输出功率达到惊人的 5495 毫瓦,整体功耗估计有 20-40 瓦。ARS540 的射频输出功率是 1143 毫瓦。
特斯拉三条线合计是 356 毫瓦,以此推测,特斯拉应该在有效距离上做了妥协。
到今年 12 月 4 日,FCC 将公布特斯拉毫米波雷达内部拆解照片和零部件构成,甚至是电路图。
出处:头条号 @汽车之心Autobit
等您评论