小鹏于2021年1月11日在广州举办“智能体验营”活动,皆电受邀前往。本次活动是小鹏继2020年“1024小鹏汽车智能日”推出NGP(Navigation Guided Pilot)工程版体验后,针对该系统的又一次体验试驾活动。

首先要点赞的是,小鹏在整个活动过程中都强调NGP Beta是“辅助”驾驶,而不是“自动”驾驶,这对消费者而言,是一个十分正确的引导。
除了新版本NGP Beta的放出,小鹏还推出了自家的领航辅助类功能评价标准。
小鹏表示,希望大家从驾驶员接管次数、变道超车成功率、出/入匝道通行成功率、隧道通过成功率及夜间同类型数据等维度,来评判辅助驾驶系统的能力,同时也非常自信地表示:欢迎用户以此类标准去评价NGP的表现,同时也欢迎所有媒体鹏友的测试以及友商的PK。
第一感受,就是整个交互界面更加丰富、更加清晰了。
中控屏的左侧4/5的位置都用来显示路况,辅助驾驶框的右上角是交通指示标识,右下角为小地图,左上角为辅助驾驶功能的运行状态,包括NGP是否启动或是提示接管等等:

实时3D建模非常直观,据小鹏工作人员补充,就算在高架和隧道也能很好完成显示,不过我们这次试驾没遇到这些路况,有点可惜。
定位和地图方面,NGP Beta与高德合作的高精地图,可以很清晰地标明车辆所在车道,同时对于路面的标线以及箭头也能做到实时显示,清晰直观。
路况简略信息也会在仪表盘位置显示:

启用NGP Beta的方法也很简单,设定好目的地,当路况允许后,双拨方向盘右后方的拨杆就会自动进入NGP Beta接管,如果你当前在使用LCC车道居中,那么一旦NGP Beta条件满足,也会自动切换成NGP状态。

从去年1024至今,小鹏NGP已经经历了12次大版本迭代以及91次小版本迭代。按照小鹏的描述,目前NGP Beta覆盖了自动超车、自动限速调节、最优车道选择、自动切换高速公路、自动上下匝道、变道自动紧急避让等使用场景,可实现交通锥/水马识别与避让、夜间超车提醒、故障车辆避让等功能。
本次试驾路段分为城区路段和高速路段,NGP Beta可在大部分高速路段中开启,我们来看看它的表现究竟如何。(关于可用区域这一点我们后面还会讨论)
一、道路识别
这次的体验过程中,NGP Beta对于车道线和其余车辆的识别都非常准确,并能及时反应。譬如进入变道准备后,如果发现道路是实线,将延后变道操作。此外,除了识别其它车辆,新的NGP Beta还能识别雪糕筒和水马等,判断车道是否失效:

二、限速调节
NGP Beta依靠高精地图判断限速条件,比如当前高精地图的限速为80km/h,那么NGP Beta开启后的默认速度即为80km/h,当然你也可以手动调节。如果高精地图限速和道路限速不一样,也优先是以高精地图的速度为准。
从高速行驶的体验来看,NGP Beta的加减速过程都是十分平缓,接近人类老司机的驾驶方式,不会出现很突兀的感觉:


三、自动超车与车道选择
在限速范围之内,NGP Beta会优先选择无车的左侧车道;如果前方有车,则会判断前车速度,速度不够则会进行变道超车,相较于之前1024的测试版,NGP Beta的变道策略更加保守,变道角度更小,且变道的时机更谨慎。

当然,如果你选择手动拨动转向灯杠,NGP Beta也会自行变道,不过有一个小BUG就是,这种方法变道后,转向杆不会自动回正,而要手动回正。

说它变道时机谨慎,是因为在试驾过程中,笔者发现在80km/h速度左右,侧后方80、90米有车辆驶来,它也会等车辆经过后才开始变道。当然,好处是更加安全,且不会让车内的人感觉到突兀,缺点就是有点慢咯。

四、自动上下匝道
本次试驾的地点选在广州花都区,线路途经珠三角环线高速、广河高速以及深港澳高速,期间需要切换3次高速、也就相当于进入3次匝道。NGP Beta基本上都成功了。

但需要指出的是,在出匝道时,NGP Beta会将车速限制在60km/h左右,且在距离匝道前300米左右就会开始降速。这和变道一样,都很保守。我们在试驾过程中,出现了“前方车辆明明还很距离远,但是就是不提速,且后方有来车紧跟”的情况,让人有点心急。

五、接管提醒
这一点是个人认为当天体验最好的一点。
在NGP Beta功能无法适用的情况下,NGP Beta将通过清晰的边界和责任划分系统,按照距离预先提示你接管,它包括:I告知(语音播报);II提示(语音播报+视觉提示);III警示(语音播报+视觉提示+警示音);IV强警告(语音播报+视觉提示+警示音+安全带预警),四级提醒、逐级变强。
『200米后将退出辅助驾驶系统』,可以让驾驶员提前做好驾驶准备。

值得再点赞的是,NGP Beta的辅助驾驶功能是逐级升降的,比如在切换高速的匝道上,NGP Beta退出后是降级到ACC功能;在高速路上高精地图数据丢失之后,NGP Beta退出后是降级到LCC,也就是普通的L2辅助驾驶功能还在。知道所有辅助驾驶条件不满足,才退回人工驾驶状态。

除了接管提示,NGP Beta的语音系统增加了很多功能提醒。比如在NGP Beta开始、退出、变道、施工路段、大货车较多等等等场景,小P都能进行相应的语音提醒。如果你不喜欢语音提醒的话,也可以在设置里面切换成音效提醒,类似于导航的简洁模式。
通过准确的风险场景识别以及清晰的分级接管提醒,让驾驶员明确知道自己何时需要接管车辆,在这一点上,小鹏要比特斯拉考虑得更加充分。
六、适用范围
前面提到过一句NGP Beta适用范围的问题,就目前我们掌握的信息而言,这主要取决于高德的高精地图数据库,理论上,高精地图能覆盖到的地方,NGP Beta都可以开启。只是目前官方也没有一个确切的可用区域。

就目前所知,广州的内环路、环城路,深圳的北环大道、滨河大道等环路是可以开启;而北京五环内由于不允许高精地图采集数据,所以也无法开启,其它大部分高速都可以正常使用。
七、看不见的部分
除了上述我们能够体验到的功能,还有一些隐藏不到的黑科技。
小鹏表示,NGP Beta将融入动态交通数据,包括实时交通信息、车道级路况、事件信息服务、交通预测等。用户可以通过界面显示,了解视线范围外的道路情况,并以此做出判断。其中一些数据还可以作为自动驾驶系统运行期间的判断的重要参数,以保证NGP Beta功能更为可靠。
这一招的目的,是为了解决国内异常复杂的道路环境问题。相较于特斯拉的Autopilot,NGP Beta的本土化适应性更强。
——————————
小鹏P7身上,拥有14个摄像头,5个毫米波雷达及12个超声波雷达(感知),厘米级高精定位+分米级高德高精地图(定位),英伟达Xavier的运算单元(运算)及博世iBooster制动助力系统(控制),并此基础上增加地图管理与融合、行为规划以及行为/运动预测等。
其中,摄像头可通过视觉来识别车辆周边的车辆距离和位置,另外还能视觉识别出前方的行人以及桩筒等障碍物,未来在还需要识别判断红绿灯信号。毫米波雷达则是用来确定车辆周边目标的距离、范围和速度。

除了感知元件,小鹏NGP Beta还有一颗“大脑”,来自NVIDIA的Xavier计算平台,这是一颗在2018年初发布的AI超级计算芯片,单块Xavier 芯片算力达到了30TOPS(峰值为32TOPS),也就是芯片每秒可以进行30万亿次运算。
这一套高强度、高冗余的硬件,再加上小鹏自研的核心算法,帮助NGP Beta实现了上述所有功能,已经可以做到高成功率、高安全性的自主变道,可以提升在恶劣天气下的行车体验与安全,并且更贴近人类的“安全驾驶技巧”,即在适宜场景下做到交通锥换道、匝道并排超大卡车等更自动驾驶辅助行为。小鹏的最终目标是实现:输入目的地,然后从A到B的点对点驾驶。

不过话说回来,就像小鹏自己强调的,NGP Beta只是辅助驾驶,而不是自动驾驶,它仍然需要用户在部分弱势场景中保持注意力,准备随时接管车辆。这一点大家一定要牢记。
据悉,NGP Beta将于今年春节前通过正式版OTA推送给用户。但需要注意的是,此版本只会搭载在智尊版P7(顶配)且选装了XPILOT 3.0的车型上。
到今年春节,NGP Beta就是目前国内最强的量产辅助驾驶系统了。
——————————
谈到自动/辅助驾驶,就不免扯到特斯拉,这次我们也将蔚来拉过来看看。(Waymo、Cruise、百度等尚未规模量产的技术开放商先不讨论)
自动/辅助驾驶的差异化竞争,主要就在技术路线、硬件与算法。其中算法各家都不同,也无法进行对比,我们先来看看硬件。

从传感器的数量来看,小鹏P7是最多的,所以其感知车身周边环境也要更为高效和精确,并且小鹏使用的是视觉+雷达的双重感知方案,可以让NGP系统作出最合适的指令。
蔚来更多倚重毫米波雷达,虽然ES6也拥有8个摄像头,但其中4个是传统的环视摄像头,只能提供近距离的车辆识别。另外3个摄像头则是挡风玻璃上方的三目摄像头,它们只能收集道路前方的信息。
所以蔚来的现在辅助驾驶功能更多是利用毫米波雷达实现变道,合流、出高速则是结合地图、毫米波雷达和前视摄像头实现。稍低于小鹏的双重感知方案,但蔚来比特斯拉多了地图融合功能,也就是会结合高精度地图来进行路况的感知。

特斯拉,很极端,就是视觉感知一条路走到黑,所以它只有一颗毫米波雷达。在变线超车以及出匝道时,特斯拉都是通过摄像头来感知周边环境。虽然说传感器数量没有小鹏、蔚来丰富,但特斯拉凭借强大的算法和图像处理,让Model 3实现同样甚至更强的辅助驾驶功能,这也是特斯特厉害的地方。
特斯拉在自动驾驶的路径上没有使用高精度地图进行驾驶辅助,而是依靠视觉和雷达感知,加上对周边车辆的行为/运动预测来达成自动驾驶。

小鹏P7的双重感知方案,其实糅合了特斯拉以及蔚来的方案,除了双重感知外,小鹏NGP也会对周边车辆的行为进行预测,并且还会使用高精度地图信息,这样全面的架构对自动驾驶是有很大帮助的。当然,更多的感知源、更复杂的架构,也会大大增加数据的处理量,对于算法和处理器也有更高的要求。

提到数据处理,我们再来看看各家的自动驾驶芯片。首先,小鹏P7使用的NVIDIA Xavier计算平台,其算力为30TOP;蔚来ES6使用的是英特尔旗下的Mobileye Eye Q4处理器,其算力为2.5TOPS;特斯拉Model 3搭载的是特斯拉自研的芯片HW3.0,单块芯片算力为72TOPS,整个HW3.0处理器算力为144TOPS。
以上就是目前三家车企的自动/辅助驾驶水平,但他们几乎约好了似的,准备集体放大招。
得益于HW3.0超强的算力,特斯拉前段时间在美国向部分用户推送最新的FSD Beta辅助驾驶系统。FSD Beta在使用中,会在Model 3的中控屏上显示道路的具体信息,可视化范围大幅提升,且模型由2D变为4D。

FSD Beta还可以支持路口红绿灯识别和禁令标志识别,在路口的探测十分具象且准确,能够根据路口标线以及导航自动选择车道(譬如说面对前方慢速行驶的车辆,可自主变道行驶)。
在通过环岛等复杂路口时,FSD Beta虽然在判断车流时稍有延迟,但也能自主遵守路口让行规则行驶,并自主避让路边的行人和非机动车。对于道路施工摆放的路障,FSD Beta也能清晰识别。
现阶段,无任何标线划定的狭窄道路对于其它所有驾驶辅助系统而言都是噩梦,但FSD Beta仍然能够胜任,路面的边界、通行路径和两侧停泊车辆全部都能被探测到。即使是在两边停满车辆的停车场路段,FSD Beta仍可识别出几乎所有交通参与者。

值得注意的是,在夜间测试过程中,FSD Beta的识别能力仍与白天时大致保持相同,依然相当精确。
为了对抗视觉算法的特斯拉,小鹏和蔚来都相继发布了下一代激光雷达解决方案。
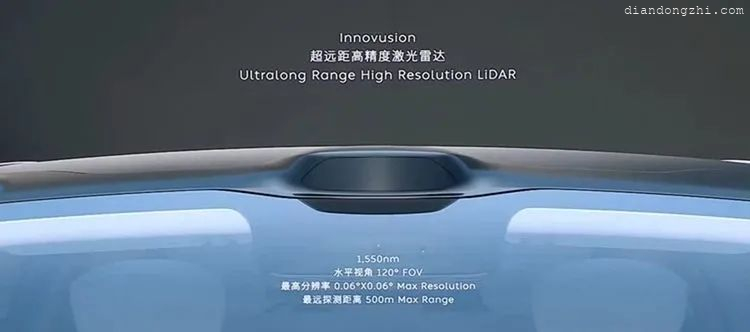
蔚来在1月9日的NIO Day上宣布,为了进一步提升自动驾驶性能,蔚来在ET7引入了激光雷达的NAD辅助驾驶方案。其激光雷达开创式的采用暸望塔式的传感器布局,按照蔚来的说法,这是目前全世界看得最远、最清晰的量产激光雷达。配合搭载800万像素高清摄像头(特斯拉为120万),实现了最佳视野位置+超广视角+超高分辨率+超远探测距离的能力。
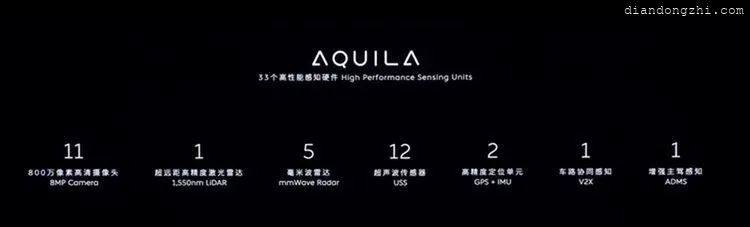
蔚来超感系统Aquila配备了33个高性能感知硬件,其中包括11个800万像素高清摄像头、1个超远距离高精度激光雷达、5个毫米波雷达、12个超声波雷达、2个高精度定位单元、1个车路协同感知和1个增强主驾感知,每秒可产生8GB图像数据。
与新的自动驾驶硬件匹配的是,蔚来超感系统和蔚来超算台,它基于蔚来全栈自动驾驶概念打造。
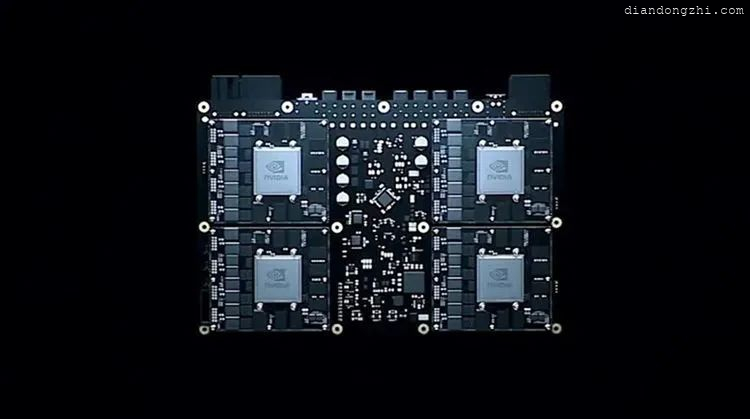
其中,蔚来超算平台是迄今为止最强大的移动计算平台,配备四颗英伟达NVIDIA Drive Orin芯片,算力高达1016TOPS。。不仅可轻松应对全栈算法计算,还具有强大的学习和冗余能力。整个神经网络算力7倍于特斯拉FSD。
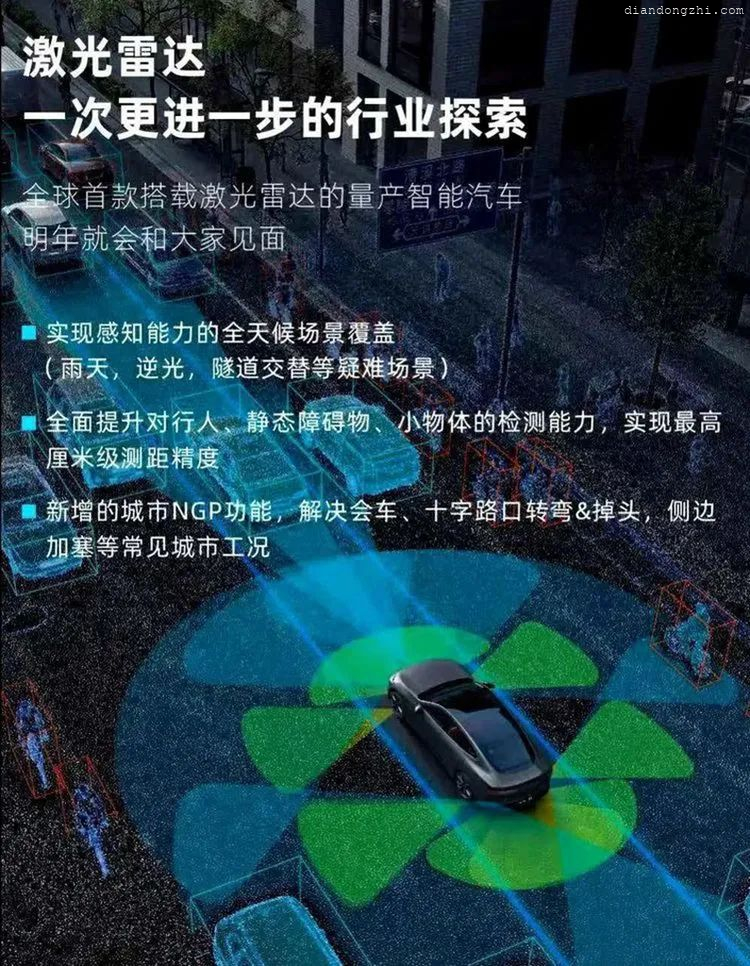
更早之前,小鹏也宣布将会升级其自动驾驶系统的软硬件架构,重点是引入激光雷达技术(LiDAR),并计划在2021年量产『全球首款搭载激光雷达的智能电动汽车』。
下一代小鹏自动驾驶在软件架构方面,将融合感知、行为规划以及行为/运动预测、地图融合等多个模块,形成数据和算法的全闭环;硬件方面,搭载摄像头、毫米波雷达、超声波传感器、激光雷达、高精度定位、高精地图、高性能计算平台的方案,总计32个驾驶传感器,打造史上最强的硬件冗余设计。

这样的体系升级将为小鹏汽车带来4个方面的提升:
第一,控制域高度集成:XPU自动驾驶智能控制单元实现4合1,将行车和泊车的智能控制集成,同时通过精简控制器、线束数量,减少系统重量。
第二,算力量级提升:高性能计算平台将实现从几十万亿次/秒到几百万亿次/秒的算力飞跃,整体算力10倍级提升。
第三,高精度定位提升:RTK终端从4G升级为5G,高精地图除优化高速道路外,补充城市道路,采用“IMU+GNSS+RTK(5G)+高精地图(高速&城市)”的新定位方案,实现厘米级高精度定位、毫秒级低延迟,以及高达97.5%以上的覆盖率,并具备超强鲁棒性,覆盖包括高楼、地下停车场等遮挡场景。
第四,感知融合能力提升:搭载激光雷达,提升识别横纵向位置精度、空间分辨率(超高分辨率<0.1°)的能力。通过视觉+毫米波雷达+超声波传感器+车规级激光雷达的感知高度融合,提升检测性能、测量分辨以及光线不足等条件下的性能,获得了更加完善的感知能力。
这么看来,未来两年的自动/辅助驾驶战场将更加火热。特斯拉鹤立鸡群的视觉识别,小鹏、蔚来的激光雷达,实在令人激动。
插一句题外话:视觉识别与激光雷达之争,也映射出自动驾驶技术发展的困境。如果前期做好安全冗余,让用户更加信赖自动驾驶技术,但硬件成本不得不提上来,拉高了体验的门槛,结果,降不下成本、做不成规模;如果前期的技术更激进,舍去冗余控制成本(如特斯拉),就可以降低体验门槛,让更多人有机会体验自动驾驶技术,但如此一来,技术的安全性就要打个问号,让人望而却步,这样规模又做不上来。
在本次活动中,所有试驾人员都将参与小鹏NGP驾驶员考试,包括一段教学视频和10道安全问题,只有通过了考试才能开启NGP功能。
对此,小鹏汽车表示,NGP高速自主导航驾驶功能依然属于“辅助驾驶”范畴,我们希望通过该功能的实现,能帮助驾驶员更轻松更安全的完成旅途,绝非“替代”驾驶员。

这一点一定要给好评,特斯拉的教训我们都有目共睹,因其模棱两可的宣传文案,让特斯拉用户误以为自己的车辆已经实现“完全自动驾驶”,从而酿成不可挽回的错误,引以为戒。
最后,希望国内从事自动/辅助驾驶技术开发的车企们,都要脚踏实地、不要夸大宣传,向用户们传达正确的观念,以及提供更好的技术服务。
撰文:凉介
Leave a Reply
You must be logged in to post a comment.