

特斯拉近期与激光雷达公司Luminar签订了一份使用激光雷达进行自动驾驶测试的开发合同,网上流传的特斯拉ModelY车顶装有激光雷达的照片坐实了这个猜测。马斯克曾称激光雷达为“拐杖”(Crutch),为何特斯拉却在测试激光雷达,这里汽车人参考进行深入解读。

背景:谷歌派 VS 特斯拉派
从辅助驾驶到自动驾驶,最终走向无人驾驶,依据智能化以及联网的水平,衍生出了“单车智能”和“车路协同”两条发展路径。
单车智能的发展路径,全球又分为了两条技术路线,一是依靠激光雷达和高精地图的“谷歌派”;二是以视觉感知和影子模式为代表的“特斯拉派”。
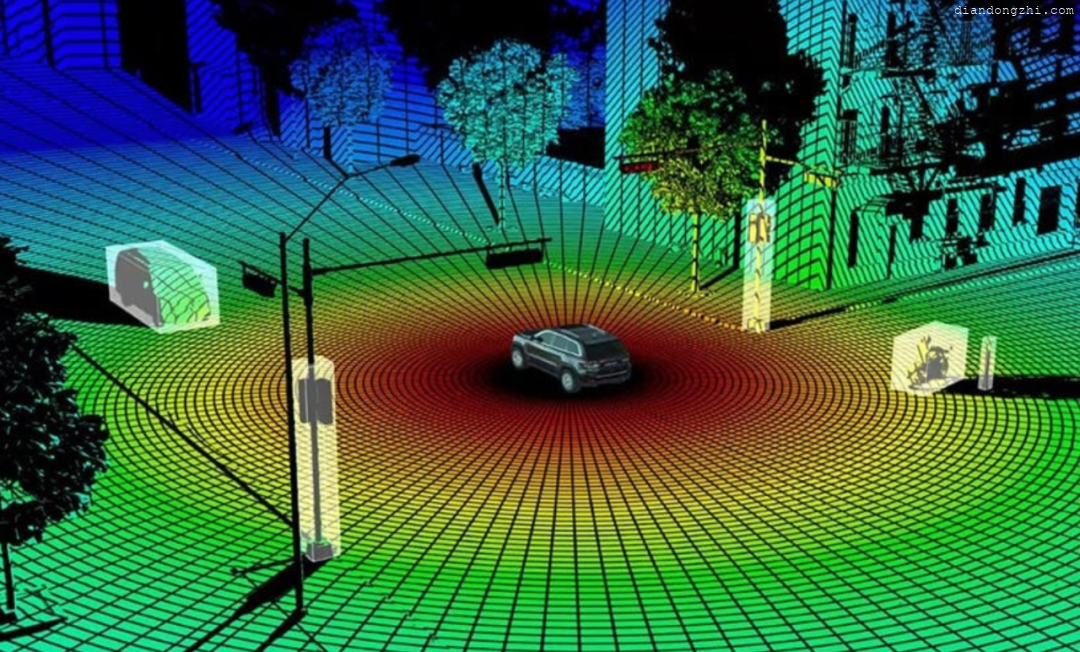
“谷歌派”的代表企业是Waymo,Waymo以激光雷达为主要感知设备,采取了激光雷达、毫米波雷达、摄像头等多传感器融合。
同时,依靠谷歌地图专业的测绘车队,Waymo采用高精度地图进行定位,Waymo主要的产品是L4级别的无人驾驶出租车Robotaxi。
特斯拉不使用激光雷达三个原因
很多人认为特斯拉不使用激光雷达是因为不懂激光雷达,事实上,马斯克在2003年创立了SpaceX,其来往于国际空间站的太空舱就已经使用激光雷达。
该激光雷达由SpaceX设计并制造,而马斯克则是项目的带头人,也是SpaceX的首席工程师。
基于对激光雷达的深刻理解和应用经验,促成特斯拉并没有采用激光雷达。

第一,第一性原理。
马斯克认为人类因为有两只眼睛,可以在任何地方开车,道路是为视觉导航而设计的。
只要使用足够多的真实世界数据,来开发和训练一套模拟人类视觉的神经网络,就能够实现自动驾驶。因此,从第一性原理出发,特斯拉不需要激光雷达。

第二,高精地图是问题所在。
激光雷达需要与高精地图配合,激光雷达本身不是问题,高精地图才是问题所在。
高精地图构建十分复杂,即使是拥有地图和街景的谷歌,创建3D的高精地图并不像看起来那样容易。
绘制高精地图,需要专业的测绘设备及工程师的手动标记,高精地图每个厘米都需要进行3D映射和验证。从一条街道拓展到另一条街道,从一个城市拓展到另一个城市,最终覆盖到所有国家,是一项十分昂贵且挑战的资源密集型工作。
这也是Waymo的Robotaxi目前仅能在少数预先映射的地理围栏城市中运行的原因。
特斯拉希望开发一套自动驾驶系统,可以在世界上任何道路的任何地方使用,而依靠高精地图的激光雷达路线,并不是一个通用的解决方案。

第三,激光雷达的限制性。
激光雷达无法识别颜色,因此无法区分交通信号灯等物体。还是需要配合着摄像头来使用,特斯拉相机及其神经网络计算机可以重建特斯拉车辆周围的3D世界观,这使得激光雷达不必要。
特斯拉使用计算机视觉,仅依赖摄像头即可创建3D世界视图。再加上激光雷达昂贵的售价,以及丑陋外观,也是限制特斯拉使用的原因。
如何看待马斯克使用激光雷达
在2019年特斯拉自动驾驶日上,马斯克透露特斯拉内部曾对激光雷达进行了测试,试图采用激光雷达和高精地图的方案实现完全自动驾驶。
但是,特斯拉很快放弃了该项目,因为激光雷达和高精地图给人一种错误的进步感,是“拐杖”和“愚人的差事”。
单从一辆测试车,并不意味着特斯拉技术路线的完全转向。
汽车人参考认为,特斯拉更有可能使用Luminar的激光雷达来验证其完全自动驾驶功能;或者是在评估激光雷达与其现有摄像头系统相比性能如何。
从另外一个背景来看,特斯拉进入中国市场,已经遇到了数据采集的问题,如果要在中国顺利推行自动驾驶,需要建立本土的数据中心,采用激光雷达并和具有资质本土地图商合作,也是一种备份的方案,最终都取决于特斯拉的选择。
至于说马斯克被激光雷达打脸,或者说马斯克被妥协,还为时尚早。
出处:头条号 @汽车人参考
等您评论