Tag: 无人驾驶

白花了100多亿美元,通用汽车放弃了“Robotaxi”的研发
当地时间12月10日(周二),通用汽车(GM)宣布,由于扩大业务规模所需的时间和成本… read more

智驾只有华为系,其他真不行?
这两天有一个民间组织对一些新能源车做了一些测试。一共五款车型分别是小鹏G9,理想L6,问界m7,特斯拉model y… read more

标普全球汽车的Henner Lehne:中国汽车的价格竞争力将持续2~3年
回望2024年的全球汽车市场,新车型推出速度显著加快,动力类型日益丰富,车型设计也更… read more
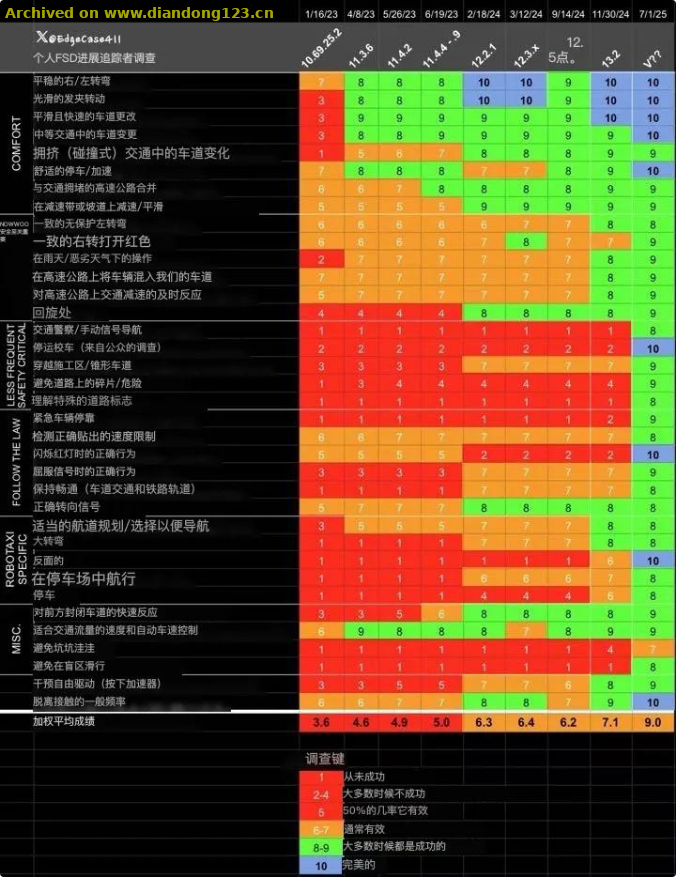
智驾测评报告:特斯拉FSD V13.2得分7.1分,2025年初达到9分!
特斯拉全自动驾驶(FSD)测试人员 @EdgeCase411 近日发布了最新的FSD 13.2版评分卡。根据评分数据… read more

自动驾驶哪家强,将如何改变未来出行方式!
如今,自动驾驶呼声越来越高,离我们生活也越来越近,目前自动驾驶技术最先进的公司包括华为、百度、特斯拉等公司。 read more

特斯拉的蒋丹:新能源汽车行业已经进入下半场
以“开放创新 共享未来”为主题的2024深圳全球招商大会在深圳会展中心(福田)举行。12月6日,2024深圳全球招商… read more

特斯拉有不可逾越的优势?车主给了答案
特斯拉受美国影响,而中国作为美国强竞对手,工业产能超美。中美关系似昔日英美,美国与其盟友实力仍超中国。 read more

就这算“自动驾驶出行第一股”?
PONY,意为矮种马,或是小马宝莉。但在中国,它几乎完全与一个人绑定——马化腾(Pony Ma)。但小马哥要有危机感… read more

蔚来十年:十个瞬间,十个关键词
昨天(2024年11月25日),蔚来汽车迎来了十周岁生日。这家长期作为中国造车新势力领头羊的企业,是怎么走到今天的? 我们用10个瞬间和10个关键词,来帮大家回顾一下。 第1个瞬间: 蔚来车队获得Formula E冠军 关键词:性能 蔚来汽车是怎么闯入我们视野的? 对多数人来说,蔚来汽车留下的第一印象也许是,不擅长赛车的中国车队,由不知名企业冠名,居然拿了冠军。 2015年6月28日,Formula E国际汽联电动方程式锦标赛首个赛季(2014-2015)完赛,NEXTEV蔚来汽车TCR车队的车手获得Formula E历史上首个年度车手总冠军,这也是中国车队迄今为止在国际顶级汽车赛事中取得的最好成绩。 2014年11月15日才成立的蔚来,干这么“烧包”的事,也有其逻辑——蔚来即将造的车都是比较贵的,还是电动汽车,消费者凭什么认你? 蔚来赞助Formula E参赛车队,并且将其电动汽车技术应用到赛车之中——证明蔚来有顶尖的电动汽车技术,而且有性能烙印,为其高端、豪华定位奠定基础。 后来,蔚来车队连续多年参赛,直到2019年的“至暗时刻”,才将其出售。 蔚来汽车还连续十年冠名支持中国大学生电动方程式大赛(FSEC),并在2021年开始支持中国大学生无人驾驶方程式大赛(FSAC)。该赛事至今已累计为中国汽车行业输送人才6万多名。 从现在回看蔚来在赛车上的“烧包”,就比较合理,甚至令人肃然起敬了。 第2个瞬间: 五棵松首款车发布会 关键词:烧钱 蔚来汽车给业界同行和媒体最大震撼的开始,来自于首款车的发布会。 2017年12月16日,蔚来汽车首款车型ES8在北京五棵松体育中心发布,盛况空前。事后有人总结,蔚来包机包五星酒店把前5000位预定车主请到了现场,其整体花费更是高达8000万元之多。 与排场相对应,同样震撼的是蔚来首款车的价格,按补贴后价格,依旧高达44.8万元起售。初出茅庐的蔚来给出这个价格,比后来高合的57万、仰望的109.8万都要石破天惊。 同时蔚来在这场发布会上也开启了车电分离模式,用视频展示了换电补能方案。 这场发布会颠覆了汽车行业的发布会印象,形式之新颖,效果之引爆,自此不断被模仿,从未被超越。 蔚来以“NIO DAY”形式做年度最重磅发布,也成为惯例,并且不断扩展,成为蔚来车主的节日,各地车友会还会抢着申办当年NIO DAY,并且伴有蔚来集市等衍生环节。 蔚来后续还办了NIO IN——相当于科技节,POWER DAY加电日——相当于充换电年度发布会(最近一次叫POWER UP)。这些发布会都成为业界关注的热点。 但蔚来开发布会之“烧钱”,同样在人们印象中无法磨灭。叠加后续蔚来用户中心的选址、设计、接待,以及某些早期蔚来高管的生活作风传闻,蔚来不断有奢侈的批评声。 第3个瞬间: 首个换电站落成 关键词:服务 在蔚来首款车发布近半年之后,蔚来首个换电站才建成。 2018年5月20日,蔚来首座换电站在深圳南山科技园落成。逐渐地,换电成为蔚来的标签。与之相匹配的,蔚来也开启了“车电分离+可充可换可升级”的独特商业模式,并且扩展出电池资产公司、换电设备研发生产公司等生态企业。 在私人电动汽车市场,蔚来几乎是凭借一己之力,开创了换电模式,建设了庞大的换电网络,并赢得了消费者和同行的认可。 资料来源:蔚来官方 在证明其可行性之后,蔚来开始建设“换电联盟”,至少7家车企参与其中,此外还有很多能源公司、电池公司。 不过,换电模式在插混、增程模式的竞争中,还不能说就已经取得了胜利。就加入蔚来换电联盟的7家车企而言,全部都有插混或者增程。 与换电类似的,蔚来给车主提供了超越预期的服务。 2018年,6辆蔚来ES8穿行新疆,蔚来派出三辆移动充电车保驾护航。但是充电车本身也是电动汽车,在充电途中耗光电量停驶,蔚来又用燃油板车拉着充电车去充电,引发网络群嘲,并且攻击电动汽车是否真的节能。 类似这样的服务,蔚来还提供了很多。在外界看来,蔚来虽然打下了“服务好”的标签,但是有过度服务之嫌,甚至让人觉得蔚来的fellow(销售顾问和服务顾问)比车主“低人一等”的感觉。 但究其本质,蔚来的换电一部分内涵和其他一部分服务,没有很大的技术创新和效率提升,而是商业创新,为高净值用户提供“管家式”的服务,用fellow等员工的时间,换取车主时间,并创造情绪价值。 第4个瞬间: 纽交所上市 关键词:融资 2018年9月12日,蔚来正式在纽交所挂牌上市。 对于很多企业来说,上市基本意味着融资“烧钱”的结束,盈利的开始。 但对于已经融了很多很多轮次、很多很多钱的蔚来而言,纽交所上市,仅仅是融资的一个阶段性节点。 很多早期投资者解禁期过后“上岸”,但蔚来还在多渠道、多层次不断融资,后来在香港、新加坡上市。 就在最近,蔚来的2024年三季报上,合肥建恒新能源汽车投资基金等三家公司又向蔚来中国投资33亿元。 蔚来汽车,会不会是中国科创历史上,融资最多、最高频的企业?甚至是空前绝后的? 后续,蔚来CFO曲玉表示,蔚来经营现金流会实现一个正向的增长,融资不是必需,但也会根据市场的情况来动态调整融资的节奏。 也就是说,蔚来很可能还会融资——当然这不一定是坏事。 但是,因为是上市公司,并且已经融了很多次钱,蔚来和李斌反复被追问的问题,就是何时盈利。 李斌也将盈利时间点一再延后,当前的目标是2026年。 第5个瞬间 “保时捷的工厂,肯定比不上江淮的工厂” 关键词:生产 2018年10月27日央视《遇见大咖》栏目中,李斌一席话引发巨大讨论。 在被被问及 “蔚来与江淮合作到底丢不丢分”的问题上,李斌放言称“保时捷的工厂,肯定比不上江淮的工厂,你们不要觉得我胡说八道,因为我去参观过。” 蔚来汽车尽管是新造车势力头牌,但长期采用江淮工厂代工,并且因此一直饱受争议。尽管江淮这一工厂为蔚来专门建设,并且采用了最新设备。 植根于已经充分发展的中国汽车行业,蔚来等新势力,在生产方面,竞争力不弱,尽管在采用新材料、新工艺时,不免带来“产能地狱”和部分品质问题,但总体而言,不比合资、外资品牌差。 一直到2023年12月,蔚来才拥有了独立生产资质,并在后来收购了和江淮合资建设的工厂。蔚来在合肥也建设了新工厂,并参与建设合肥新能源产业园,招商引资了一批新能源、智能汽车零部件生产企业。李斌成为合肥“最强招商代表”。… read more
多起事故是否会影响Robotaxi的到来?特斯拉FSD在接受美国调查
特斯拉“WE, ROBOT”大会上,马斯克展示了公司关于全自动驾驶技术的最新愿景。特斯拉的全自动驾驶系… read more

特斯拉的 Robotaxi 首次“曝日光”
万圣节周末,特斯拉将在德克萨斯州的超级工厂举办一场并不吓人的Frunk or Treat活动,还有很多独家新品可看,比如首批经过碰撞测试的 Cybertrucks。 另一个标志性的展示是无人驾驶的 Robotaxi,特斯拉在华纳兄弟工作室的一场专门活动中展示了无需方向盘或踏板的自动驾驶汽车。 不过,活动是在晚上开始的,当主题演讲结束时,天已经黑了,大约 20 辆 Robotaxi 的演示都是在夜间完成的。 这使得 Robotaxi 看起来像 Cybertruck 一样银色且具有未来感,尽管它不是出于节省成本和减轻重量的目的而采用不锈钢制成,而是采用涂漆的铝合金面板制成。 事实上,在 Giga Texas 阳光明媚的天气下,Robotaxi 首次在光天化日下展示,使得 Robotaxi 的闪亮表面看起来是金色的,而不是 Cybertruck 不锈钢纹路中的银色。 白天的一切通常都比夜晚的景色更不具吸引力,但 Robotaxi 看起来和发布会期间一样具有未来感。 设计线条看起来并不那么前卫,而是颇具雕塑感,据报道,Model Y Juniper的后灯条也进行了更新,即使在阳光明媚的日子也会闪闪发光。 事实上,Robotaxi 看起来就像是 Franz von Holzhausen 设计的标志性特斯拉,尤其是在车头部分,还配备了 Cybertruck 式的灯条,效果很好。 21 英寸的车轮采用 Continental 轮胎,一半漆成与车盖颜色相同,看起来比实际更大,以有效但生产成本合理的方式体现了这一未来主义风格。 编译:见配图水印 read more

伊隆·马斯克官宣了特斯拉 Robotaxi 和 Robovan
让人期待已久的 特斯拉 Robotaxi 终于亮相了。 美西时间2024年10月10日(星期四)晚上,埃隆·马斯克在“We, Robot”主题活动上公开展示了特斯拉即将推出的无人驾驶出租车。 发布会于华纳兄弟探索频道位于加州伯班克的电影工作室举行,该工作室拥有一个郊区停车场。这个位置让特斯拉能够展示其自动驾驶能力,而不会遇到任何意外交通情况。 马斯克走进活动现场,进入一辆外观时尚的银色 Robotaxi,这是一辆双门车,采用蝴蝶式车门向上打开。Robotaxi(也称为“Cybercab”)随后载着马斯克在停车场转了一圈,然后他下车走上舞台,拉开了活动的序幕。 马斯克表示,Robotaxi 没有方向盘或踏板,也不需要插电。相反,他说电动汽车依靠感应充电,只需开到充电器上就可以充电。 马斯克称,特斯拉至少有 20 辆 Cybercab,发布会现场共有 50 辆全自动汽车,其中一些汽车已经在没有乘客的情况下行驶。 马斯克表示,特斯拉将于明年在加州和德州上路推出无人监管的全自动驾驶汽车 Model 3 和 Model Y,而 Cybercab 将在 2027 年前投入生产。不过,马斯克本人也表示,他对时间表倾向于乐观,产品交付时间经常晚于他最初的估计。 他还表示 Cybercab 将可供购买。他预计售价将低于 3 万美元。 特斯拉在 X 上的一篇文章中提供了更多细节,宣布 Robotaxi 服务将不收取司机费用,全自动驾驶汽车将仅使用摄像头,而不是雷达或激光雷达设备。该公司还表示,客户可以叫一次 Robotaxi,然后根据需要使用它,无论是短途旅行还是一整天。 马斯克没有透露太多有关 Robotaxi 背后的技术或安全功能的细节。特斯拉过去曾因其驾驶辅助系统的安全性而受到严格审查。 特斯拉还发布了 Robovan,这是一款大型穿梭车,马斯克称其最多可容纳 20 人。 马斯克还大力宣传人形机器人 Optimus,称其售价为 2.8 ~ 3 万美元,但没有透露该机器人的上市时间。 “我认为这将是有史以来最伟大的产品,” 马斯克说道, “我认为每个人都会想要他们的擎天柱伙伴。” 演示结束时,几个机器人在舞台上随着灯光秀翩翩起舞。 在发布会前,马斯克在 X 上发帖称,特斯拉在工作室里创造了一个“未来世界”,并转发了活动宣传册的照片。照片中包括一张地图,上面显示了四个不同的区域,这些区域被命名为“TSLA 剧院”、“纽约”、“大都会”和“西部世界”。宣传册上说,客人可以参观不同的区域,享受德克萨斯烧烤、街机游戏和街头表演等活动。 小册子上写道:“欢迎来到未来。” 此次活动开始较晚,比计划晚了近一个小时,马斯克在 X 帖子中表示,这是因为人群中有人出现了医疗紧急情况。 发布会还在马斯克的社交媒体平台 X(前身为 Twitter)上进行了直播,观看人数一度超过 300 万。… read more